Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I’m actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
Çöp Toplayan Robot (Open-Source)
Details
- Date : March 20, 2014
- Category : Embedded System Programming
- Organization : BAU Mechatronics Club
- Global Post : Garbage Collector Robot (Open-Source)
Açık Kaynak (Open-Source)Full Otonom Çöp Toplayan Robot Projesi
Sınırları beyaz çizgiler ile önceden belirlenmiş olan siyah zemine sahip bir alan içerinde 10 cm 'den daha kısa materyalleri toplamak için programlanmış bir robottur. Önünde bulunan iki sensor görmüş olduğu engelin çöp olup olmadığını bize söyler. Ayrıca görevini tamamladığında toplamış olduğu çöpleri yine alan içerisinde bulunan 10 cm'den yüksek bir çöp kutusuna boşaltır.
IYTE Iztech Roboleage '13 - Çöp Toplayan Kategorisi Üçüncüsü
Merhabalar,
Bu yazımda, 2013 yılında katıldığımız İzmir Yüksek Teknoloji Enstitüsü bünyesinde düzenlenen Iztech Roboleage robot yarışmaları için hazırladığım çöp toplayan robotu tanıtacak ve üretim aşamalarından bahsedeceğim.
Bu kategoriyi basite açıklamak gerekirse;
Sınırları beyaz çizgiler ile önceden belirlenmiş olan siyah zemine sahip bir alan içerinde 10 cm 'den daha kısa materyalleri toplamak için programlanmış bir robottur. Önünde bulunan iki sensor görmüş olduğu engelin çöp olup olmadığını bize söyler. Ayrıca görevini tamamladığında toplamış olduğu çöpleri yine alan içerisinde bulunan 10 cm'den yüksek bir çöp kutusuna boşaltır.
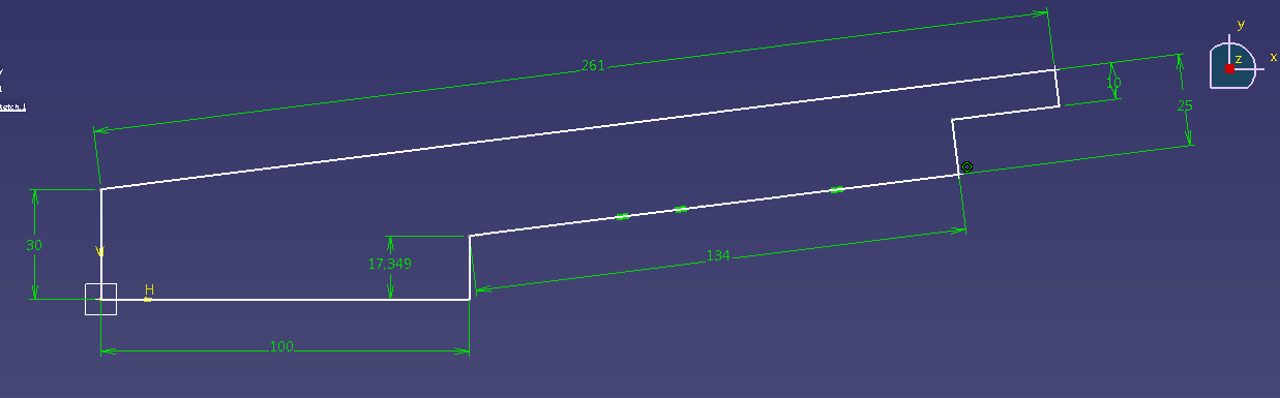
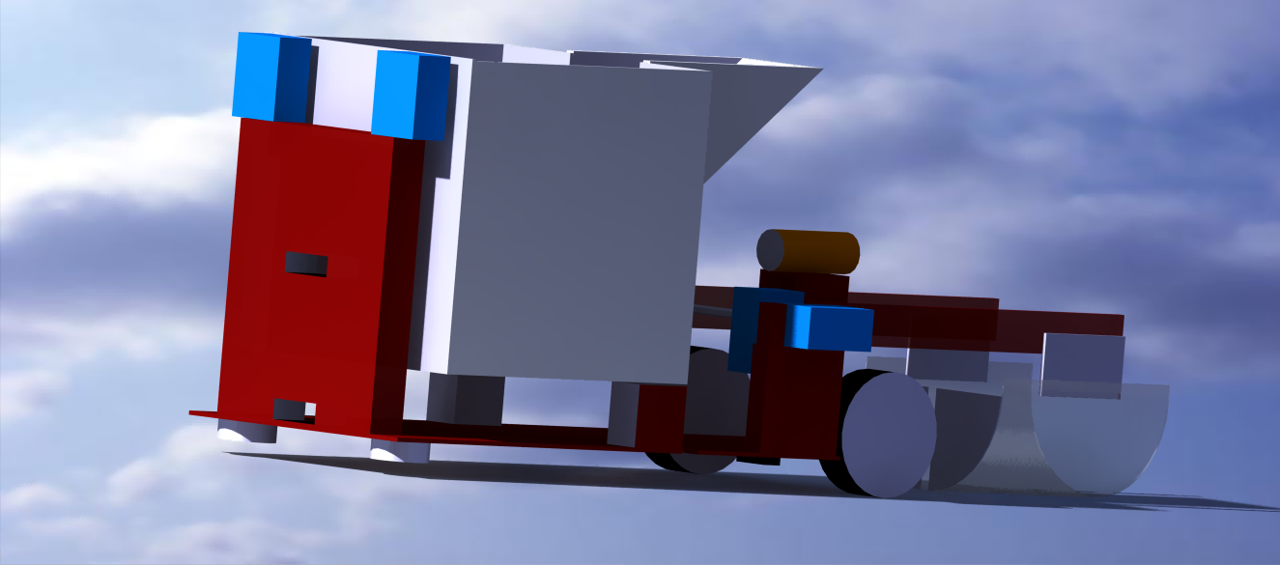
3D CAD Çizimi
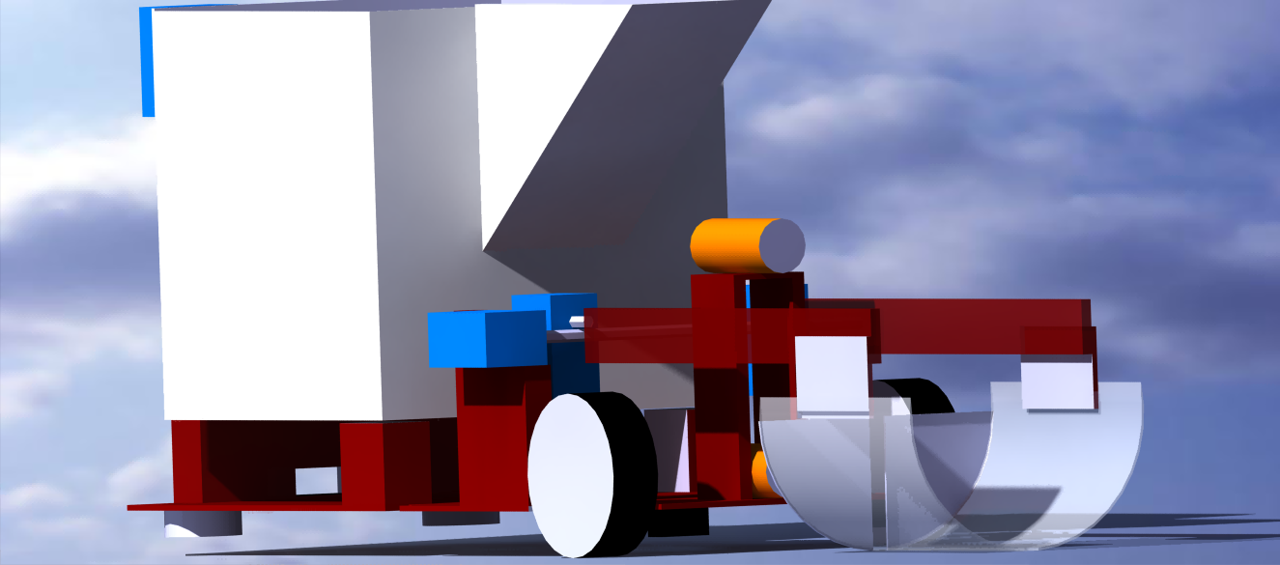
Öncelikle mekanik tasarımı yapabilmek için, üniversitenin ilk senesinde teknik çizim dersi sırasında öğrendiğimiz bilgisayar destekli çizim programı (CAD) "Catia v5" kullandım.
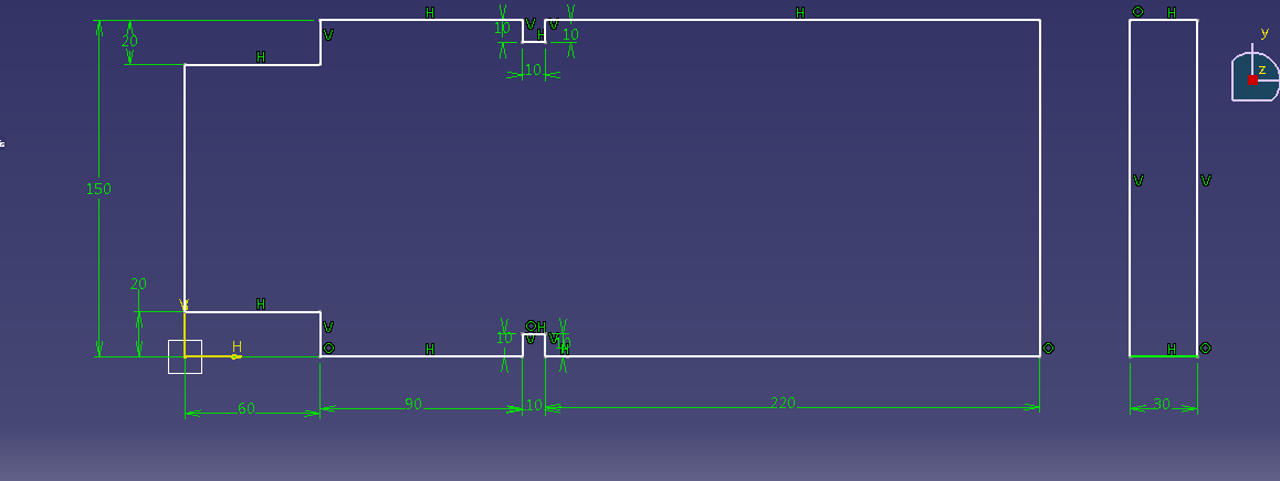
Bu çizimleri tamamlayıp, 3 boyutlu olarak montajını bilgisayar ortamından yaptıktan sonra parçaların doğruluğundan emin oldum ve Karaköy'de bulunan pleksi lazer kesim dükkanlarından birinde, beyaz renk 4 mm pleksi ile üretimini tamamladım.
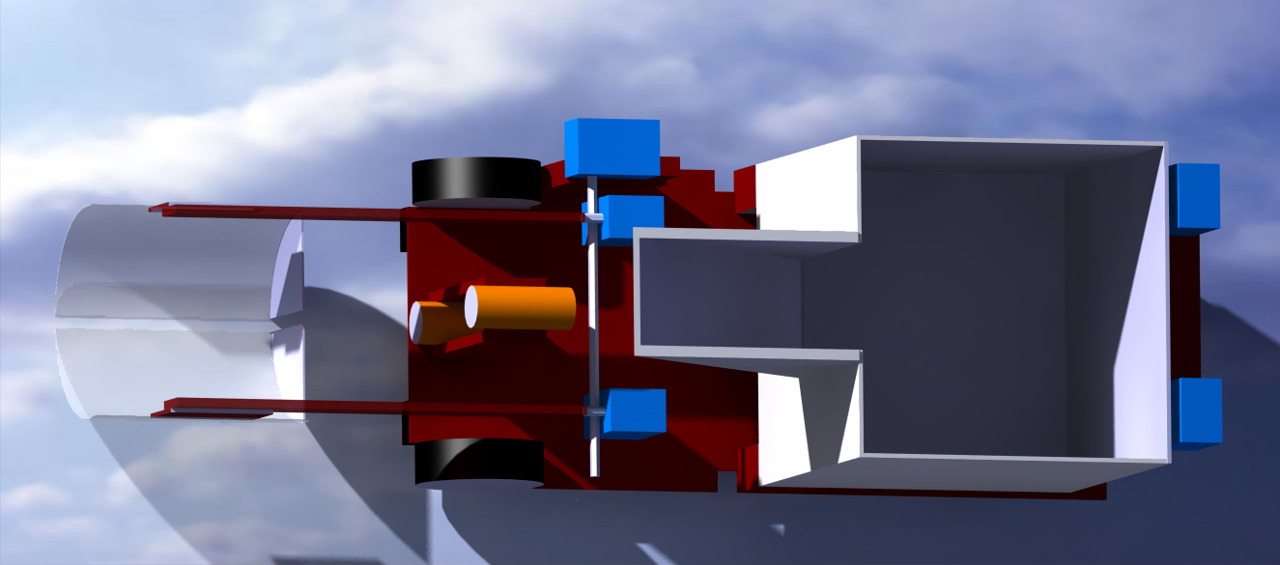
Bu tasarımı yapabilmek için, aracın temel hareketini sağlayacak dc motorları ve çöp toplama işlemini gerçekleştirecek servo motorları satın aldım ve öncelikle bunları 3D olarak çizimini tamamladım.
Çizim dosyalarını ekler bölümünde paylaşıyorum. (Catia part dosyaları olarak bulunuyor, kesim dosyaları için tekrar export alınmadı, Catia ile bir kez açılıp export alınması gerekmektedir.)
Ayrıca bu 3D model dosyalarını ve daha fazlasını GrabCad hesabımda bulabilirsiniz.
DC Motor
Burada kullandığım DC motorlar 'L' şeklinde 90 derece redüktörlü olduğu için alandan yatay olarak tasarruf sağlamamı ve ön sensörlere yer açmamı sağladı. Uygun fiyatlı bu motorlar, yine redüktörleri sayesinde, yavaş ve torklu motorlardır. Tekerleklerin kendiliğinden üzerinde olması da yine beni bir külfetten daha kurtarmış oldu ve tekerlek aramak zorunda kalmadım.
6v-250-rpm-motor-ve-tekerlek-seti

Servo Motor

Çöp toplayan robotumuzun kollarını ve damper bölümünü hareket ettirebilmek ve bu kolları açılı kontrol edebilmek için yine uygun fiyatlı hobi MG995 Servo Motor kullanıldı.
MG995 Servo Motor
CNY70 Transistör Çıkışlı Yansıyan Işık Detektörü

Çöp toplayan robotumuzun çalışması gereken alanı tanıması için, çalışma alanı siyah renkte boyalıdır. Bu alanın dışı ise beyaz bir çizgi ile belirtilmektedir. Bu çizgiyi algılamak için "Transistör Çıkışlı Yansıyan Işık Detektörü" olarak anılan CNY70 kızılötesi sensörünü kullandım.
Bu sensörü de 3D olarak çizerek projemin montajına ekledim.
MZ-80

Çöp toplayan robot, ön kısmına yerleştirimiş, biri yerden 10 cm yükseklikten aşağıda, diğeri ise yerden 10 cm yükseklikten yukarıda ola 2 adet cisim algılama sensörü bulundurur.

Bu iki sensör gördüğü engelin çöp mü yoksa başka bir obje mi olduğunu anlamasını sağlar. Eğer cisim 10 cm'den kısa ise bunun toplanması gereken çöp olduğunu algılar ve toplama hareketini gerçekleştirir. Aynı zamanda arka kısmında da 1 adet 10 yükseklikten yukarıda bir adet cisim algılama sensörü bulunur. Bu sensör ise çöp kutusunu algılar ve damper kısmına yerleştirdiği çöpleri, çöp kutusuna bu sensör ile algılayarak döker.
Bu projede kullanılan cisim algılama sensörü MZ-80'dir. MZ-80; 80cm Menzilli Kızılötesi Sensör birçok robot projesine uygun dijital çıkışlı, yüksek kaliteli, endüstriyel kızılötesi sensördür.
Li-po Pil
Enerji kaynağı olarak, RC ve hobi modellerde ve drone'larda da sıkça kullanılan, elektrik motor gibi, anlık yüksek amperlerde akım çekebilen komponentler barındıran projelerde tercih edilen Li-po pil kullanıldı. 7.4 volt yani 2 cell lipo pil tercih edildi, böylece 7.4 volt ile 6 Volt'luk DC motorlar ve Servo motorlar sürülmüş oldu.
Elektronik Devre (DC Motor Sürücü - Dual H-Bridge)
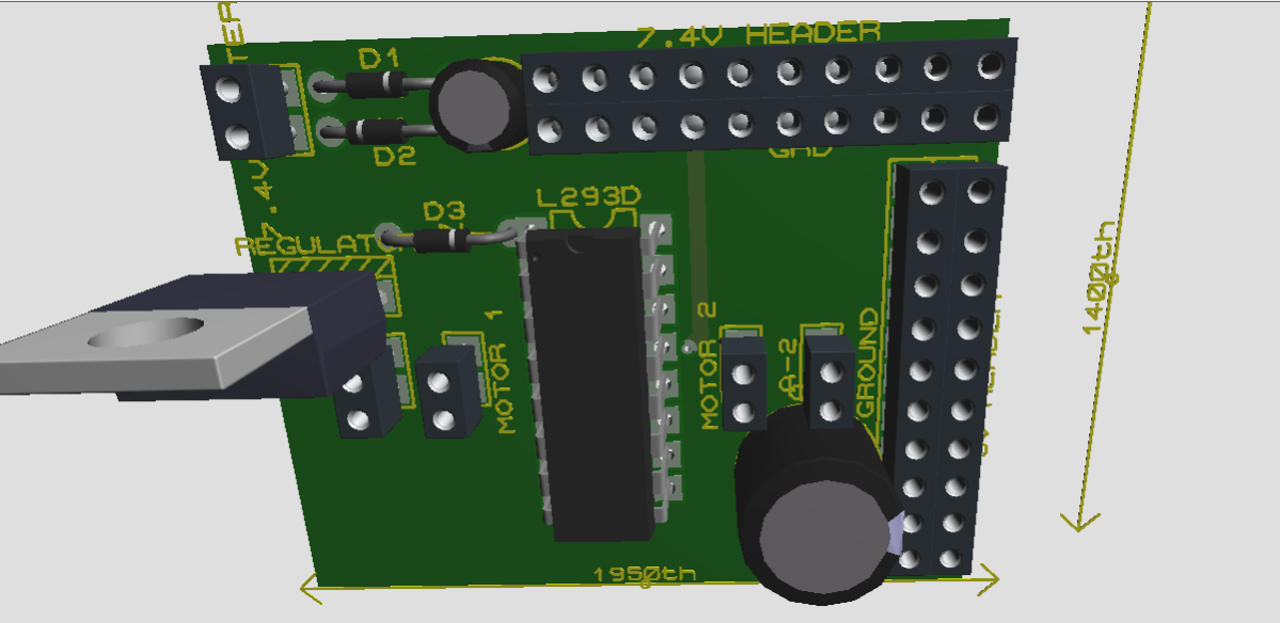
Bu devre, temelde DC motorları ayrı ayrı, farklı yönlere sürebilmek için tasarlandı. Devre üzerinde bulunan L293D Dual H-Bridge Motor Sürücü Entegresi, 1.2 amper 36 volt'a kadar DC motorları rahatlıkla sürebilmektedir. Üzerine soğutucu aluminyum yapıştırılarak kullanıldığım için daha verimli bir hale geldi.
Datasheet'e eklerden ulaşabilirsiniz.
Devre kartı Proteus 8 ile tasarlandı ve Ütü ile Baskı Devre Yapımı tekniği ile üretildi ve sorunsuz şekilde kullanıldı.
Proje dosyalarını paylaşıyorum fakat artık Altium Designer kullandığım için açıp kontrol edemiyorum. Dosyalar bölümünden indirebilirsiniz.
Gömülü Sistem Programlama
Gömülü sistem mikro-işlemci olarak, kullanımı kolay olduğu için Arduino tercih edildi. Arduino Uno, kullanılan projemizde, tabi ki bir de algoritma ışığında çalışan bir Arduno kodu bulunmakta. Bu kodu da açık kaynak olarak paylaşıyorum.
Downloads
Related Posts
Check out my all posts-
September 10, 2020
Yaklaşık olarak 1 senedir içerisinde bulunduğum bu oluşumu, bu yazımda olabildiğince anlatmaya çalışacağım.
Category 3D MODELLING
-
August 1, 2016
Bir su altı fotoğraf kabinidir. Aquabooth ‘un yanına gelen katılımcı, modülün üzerinde bulunan dokunmatik butona basarak...
Category DEVICE SOLUTIONS


Comments
hüseyin koçbay
4/9/2025
merhaba öncelikle projeyi çok beğendim bende 10. sınıf meslek lisesi bilgisayar sınıf öğrencisiyim bu projeyi sizinde katkılarınız ile okulumuzdaki sınıflararası robot projesinde yapmak isterim sizden ricam bana kullandığığımız veya kullanabileceğimiz malzemelerin listesini bana gönderebilirseniz çok memnun kalırım teşekkürler e postamdan gönderebilirsiniz. e-posta:huseyinkocbay307@gmail.com
3/20/2014
utku olcar
Açık Kaynak, Arduino, Catia, Catia v5, Çöp Toplayan, Garbage Collector, Open Source, Otonom, Proteus Embedded System Programming, PCB Design
1 Comments