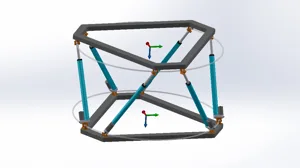

Preparing technical drawings and 3D models of a robot or device, using a CAD Software. Programmatically model them to see behaviours.
Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I'm actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
About Me
Main informations
I'm
• CTO at Hisseli Harikalar Fabrikası
• Interactive Experience Product Developer
• Robotics Researcher.
Before :
• Chairman of the BAU Mechatronics Club for two years.
• Trainings about robotics, basic electronics, and embedded system programming given by me.
• Vice coordinator of the BAURobotics'15 robotic competition.
• My projects won degrees many times in the prestigious robotics competitions.
• I made two different projects in Robotics LAB in BAU and I supported many others.
I have been dealing with robotics design and modelling, embedded system programming, 3D technical drawing, and GUI programming since 2014.
- 03.03.1993
- 33
- İstanbul
- Bahcesehir University
- Bachelor
- www.utkuolcar.com
- utkuolcar@gmail.com
- +90 544 816 99 51
- @utkuolcar
Technical Abilities
Services
Meet my amazing services
B&R PLC Hard Real Time,
Linux headless, Raspberry Pi,
Intel Galileo & Edison Boards, Pic Microcontroller, Arduino etc.
Forward & Inverse Kinematics, Featherstone Algorithm, Potensial Field Algorithm. Calculation for different type of robots and complex applications.

MQTT Protocol, M2M Communication, Sensor Applications, Driving Different Type Actuators etc.

Creating applications by processing 3 dimensional coordinate datas of human joints or depth point datas in 3D space (from Kinect Sensor or professional systems) on Linux or Windows.

Certificated for "Project Management Program" approved by Project Management Institute (PMI).





Featured Posts
Check out my all posts-
A comprehensive guide covering AKS GPU cluster setup, Python API architecture, Docker GPU builds, Kubernetes deployment, async queue with Se...
Featured Projects
Check out my all projects-
Giant robotic hand teleoperation project.
-
KUKA iiwa robot arm obstacle avoidance project.
-
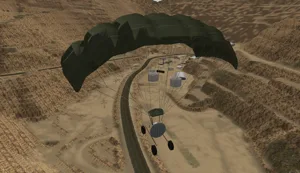
A real-time paramotor flight simulation built in Unity3D, where all aerodynamic forces — lift, drag, thrust, and gravity — are derived from ...

Featured Works
Check out my all works-
Nike Air Max 720 interactive experiment with EEG.
-
Digital penalty kick event game.
-
Twitter challenge event software.


Popular Entries
Check out my all entries-
Underwater photo booth event product.
-
A comprehensive guide covering AKS GPU cluster setup, Python API architecture, Docker GPU builds, Kubernetes deployment, async queue with Se...
-
I prepared this post to explain how does inverse kinematics work with parallel robots.