Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I’m actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
Garbage Collector Robot (Open-Source)
Details
- Date : March 20, 2014
- Category : Device Solutions
- Organization : BAU Mechatronics Club
- Türkçe Post : Çöp Toplayan Robot (Open-Source)
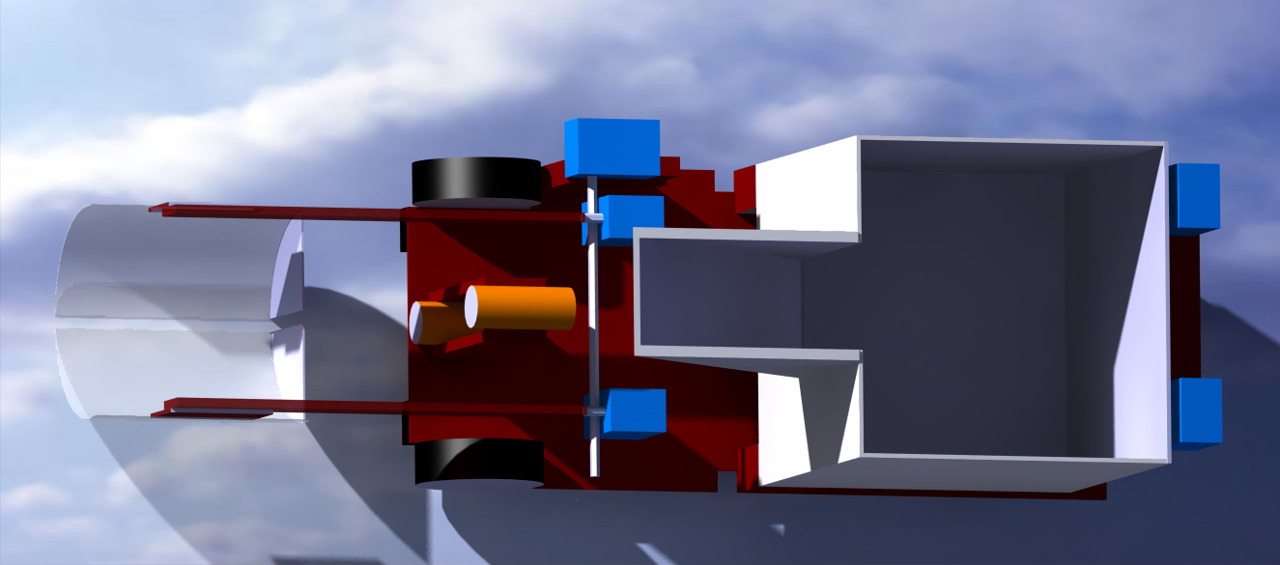
Open-Source Fully Autonomous Garbage Collector Robot Project
It is a robot that programmed to collect the materials which have less than 10 cm height in a black 2m x 2m area that bounded with white lines. The Robot has two sensors in the front and the microcontroller decide that the material is garbage or a bin using the sensors data. Besides, after that the robot collected ten garbages in the area and completed its mission, it begins to search for finding a bin more than 10 cm in height.
Third Place Of Garbage Collector Category in IYTE Iztech Roboleage'13
Hello everybody,
In this post, I am going to introduce the project that is prepared for the Garbage Collector Category in IYTE Iztech Roboleage'13 Competition and share the production information. In addition, all of this project is open-source!
First of all, The purpose of the robots that join this competition is that collecting the materials which have less than 10 cm in height in a black 2m x 2m area that bounded with white lines. After the robot collected ten garbages in the area and completed its mission, it begins to search for finding a bin more than 10 cm in height and dump them all.
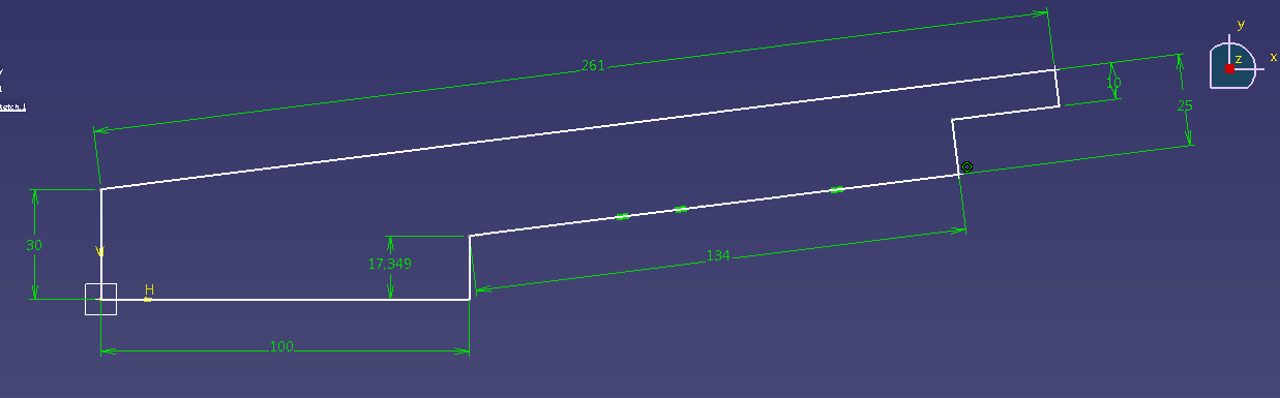
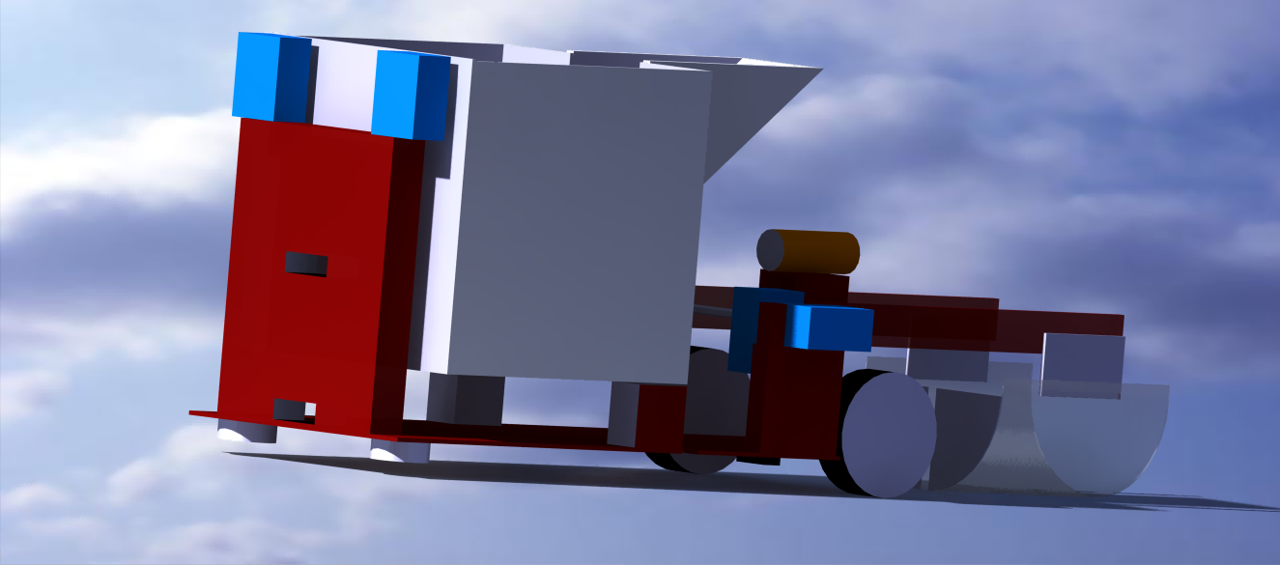
3D CAD Drawing & Modelling
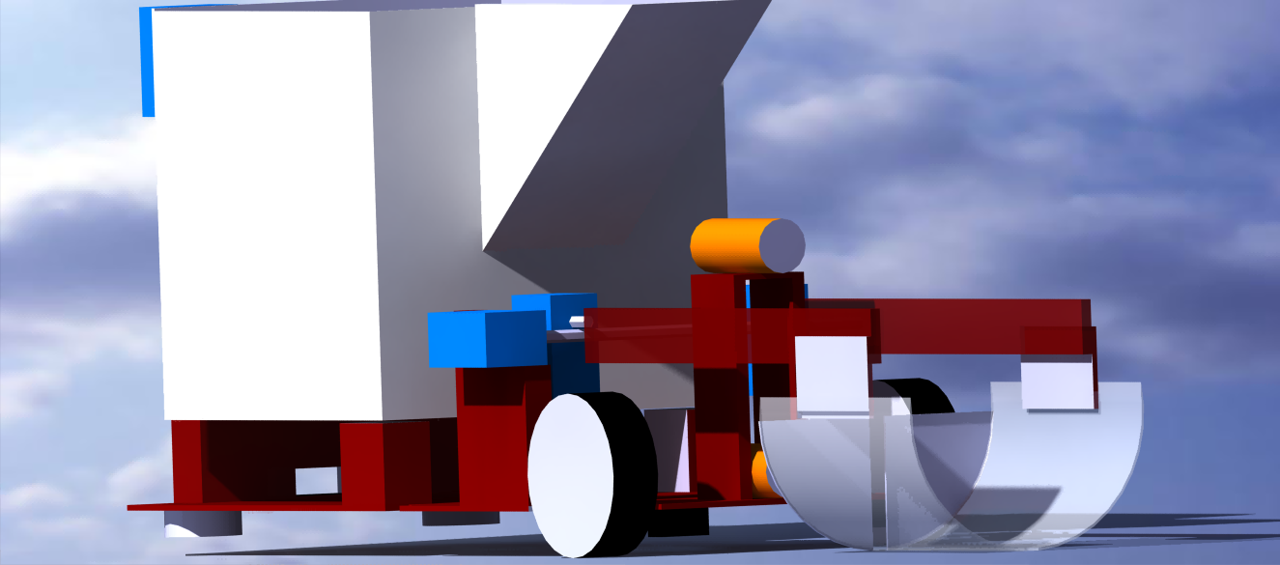
I have used the "Catia v5" software to design a garbage collector robot. In the first year of my university, we have learned this software as our CAD technical drawing tool.
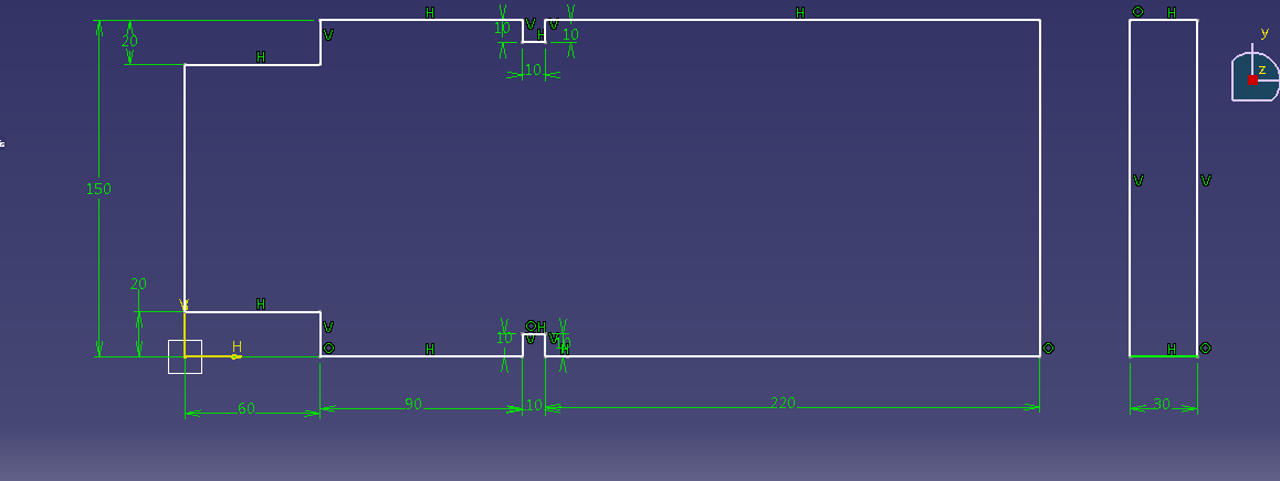
I have designed every part one by one and assembly them on Catia software to be the sure correction of the parts I draw. After the virtual assembly process, I produced the parts from 4mm plexiglass material by using CNC Cutting Machine.
To complete the 3D design, I have also drawn the 3D models of the DC motors, servo motors, and other components to see virtually the result of the assembly.
I shared the Catia part files on the attachments. (Catia part files are not exported to a proper format to use with CNC cutting machine. You need to open with Catia software and export them)
You can also find these 3D model files on my GrabCad Account
DC Motor
The DC Motors that I have used for this project, have an 'L' shaped reducer. It gave me more space in the middle of the front side to place my two infrared sensors. these low-cost dc motors are slow and they have high torque values thanks to their reducers. This model of dc motors are sold with the tires also, and this is a good opportunity for me. I did not need to produce or search for a compatible tire. Totally, time-saving.
6v-250-rpm-motor-ve-tekerlek-seti

Servo Motor

to move the collecting arms and the cargo box and precisely control them with angle, I have used hobby servo motors. MG995 Servo Motor is low-cost and strong enough to carry our garbage.
CNY70 Reflective Optical Sensor with Transistor Output

The working area must be described somehow as a result of the fully autonomous working principle of our garbage collector robot. The working area of the robot is must be black floor and the boundaries described with white lines. The robot uses the CNY70 reflective optical sensor to perceive the area that should be cleaned.
This sensor is also modelled with 3D CAD software and added to the virtual assembly.
MZ-80

The garbage collector robot has two object detection sensors on the front. One of them placed under 10 cm height from the ground, the other one placed above the 10 cm height.

These two sensors work together and provide data to understand that the object ahead is garbage or the waste bin. If the non-classified object is less than 10 cm in height, the robot decides that the object is garbage and must be collected, and starts to collecting movement. The robot also has one more sensor ahind which is above 10 cm. This sensor perceives the waste bin and the robot dumps the garbages inside of the cargo box into it.
The object detection sensor in this project is MZ-80. MZ-80; is an infrared sensor that has an 80 cm range, high quality, and industrial.
Li-po Battery
In this project, a lipo battery is preferred for the power supply. Li-po batteries are usually preferred for RC and hobby models and drones because these types of devices contain electrical motors. Electrical motors suddenly consume so much power and draw current. I have used a 7.4 Volt lipo battery
Electrical Circuit Board (DC Motor Driver - Dual H-Bridge)
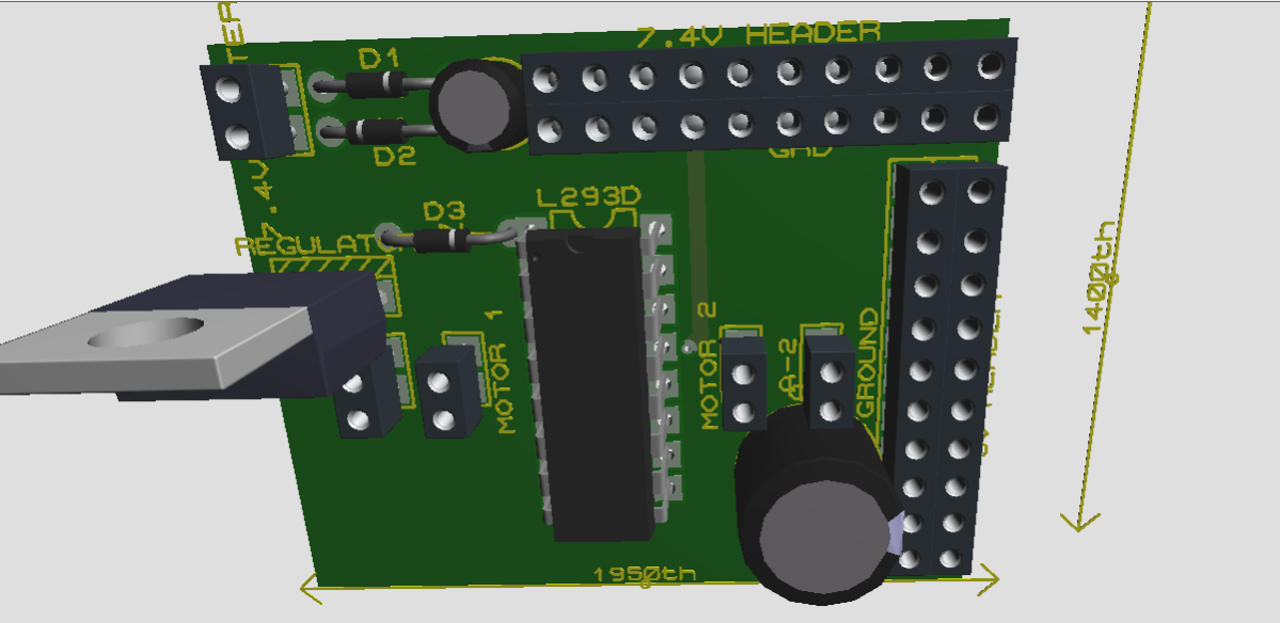
This circuit board basically designed to drive two different dc motor, different ways at the same time. The L293D Dual H-Bridge Motor Driver Integrated Circuit has designed to provide 1.2 Amper up to 36 volts to drive dc motors. I have also placed an aluminium heat sink on the motor driver for more efficient usage.
You can download the Datasheet
The circuit board is designed with Proteus and produced by ironing PCB using laser toner transfer
Proteus project files are shared. You can download it.
Embedded System Programming
I have used Arduino Uno as a microcontroller. I am sharing the Arduino code with you.
Downloads
Related Posts
Check out my all posts-
April 8, 2015
An open-source internet of things project for management and automation of your needs. Runner-up: IoNeeds project -...
Category IOT DEVICE SOLUTIONS
-
January 10, 2018
The Immersive Run Room product is designed for that the participants see themselves inside a different world while they ...
Category GUI APPLICATIONS
-
April 25, 2017
This is a physical game for events to which participants can play a minute, especially for sportive brands. The system h...
Category DEVICE SOLUTIONS


Comments
Uzair
2/23/2024https://www.youtube.com/channel/UC86bOJC2y5_fKrODiJHDUMQ

what arduino board have you used for your garbage collector project?
3/20/2014
utku olcar
Arduino, Autonomous, Catia, Catia v5, Garbage Collector, H-Bridge, Open Source, PCB Design, Proteus Catia, Device Solutions, Embedded System Programming, Gömülü Sistem Programlama, PCB Design
1 Comments