Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I’m actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
Tag : Robotics
Check out my all posts-
December 1, 2019
How to Make A Teleoperated Robotic Hand? This is an approximately 50 cm lenght robotic hand, designed and produced ...
Category ROBOTIC DESIGN AND MODELLING
-
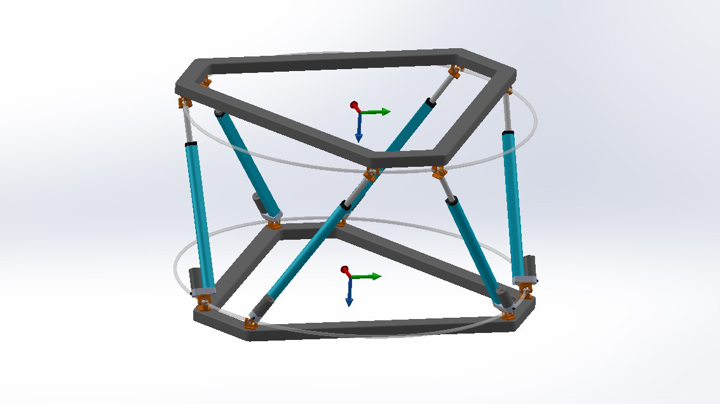
November 13, 2019
I prepared this post to explain how does inverse kinematics work with parallel robots.
Category ROBOTIC DESIGN AND MODELLING
-
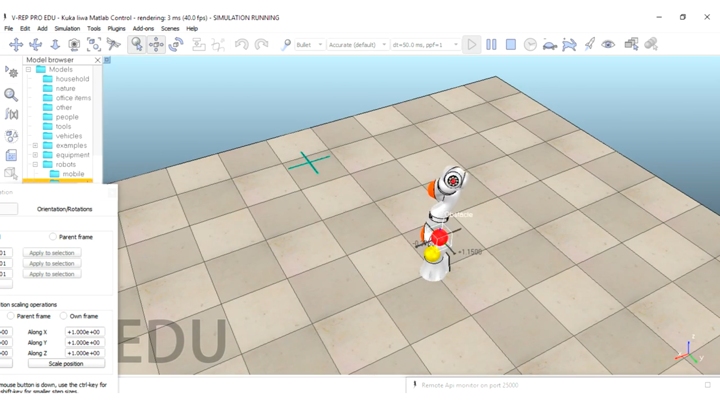
Februray 2, 2017
The main idea is that adding external forces to the joint points of the robotic arm. If any obstacle (object) is close e...
Category ROBOTIC CALCULATIONS

BLOG
bütün yazılarıma buradan ulaşabilirsinizNo entry available