Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I’m actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
BUG Algorithm Application Using ROS (Robotik Operating System)
Details
- Date : January 10, 2021
- Category : Robotic Programming
I am going to explain my work about programming a navigation code inspired by the Bug0 Algorithm for the Turtlebot3 robot in the GAZEBO Simulation platform. I have programmed this algorithm in Robotic Operating System using Python programming language.
Robust control algorithms were not used in this work. This algorithm is programmed with position control only. The main idea is to use ROS development tools and systems like Action Server, Launch Files, rViz Visualization, TF Transformations, Gazebo Simulation, etc.
Youtube Link : Youtube Link
If you want to get the source code, please contact me.
What is the Bug0 Algorithm?
The Bug0 Algorithm is an autonomous navigation algorithm that uses only the sensor's data without any map. The algorithm has basically two different behaviors;
- Behaviour 1: Head to goal straight
- Behaviour 2: Follow the obstacle boundary
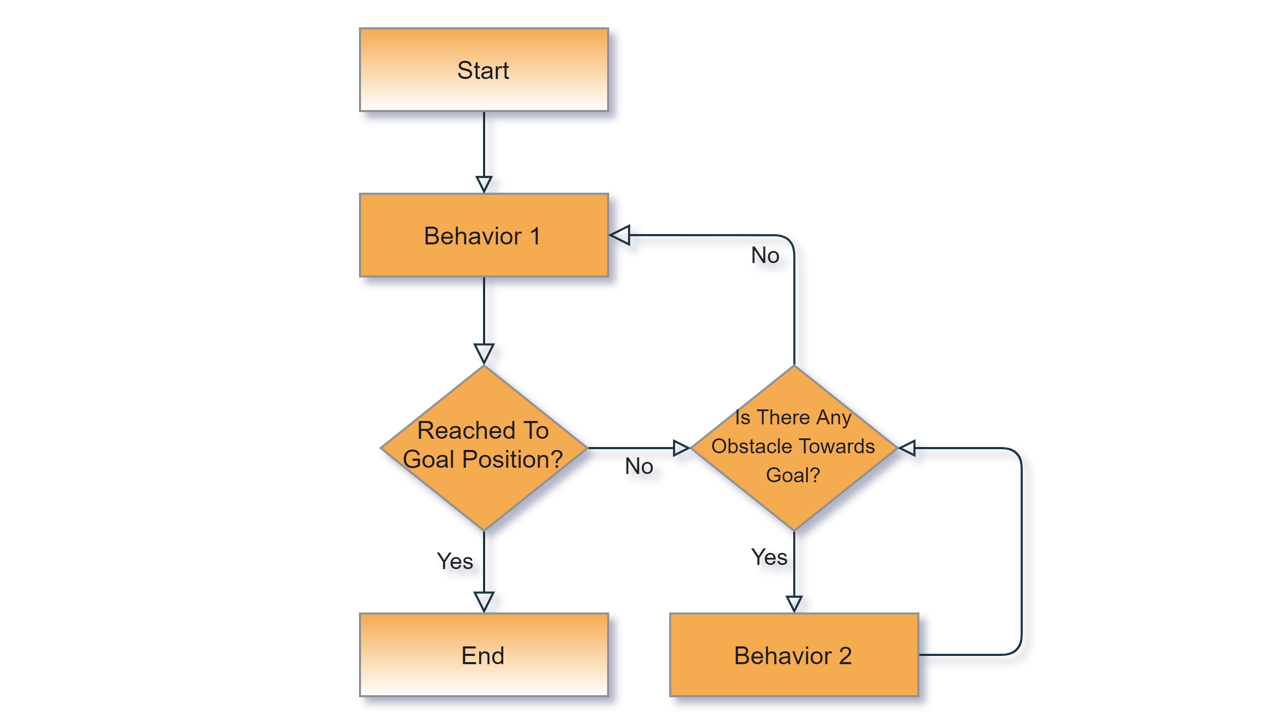
The algorithm tells that the robot implements the "Behavior 1" and goes towards the goal position until an obstacle detected in front. If there is an obstacle, the robot changes behavior to "Behavior 2" and follows the obstacle boundary. When there is no obstacle between the robot and the obstacle, the robot executes the "Behavior 1" again. So, this loop continues until the robot reaches the goal position.
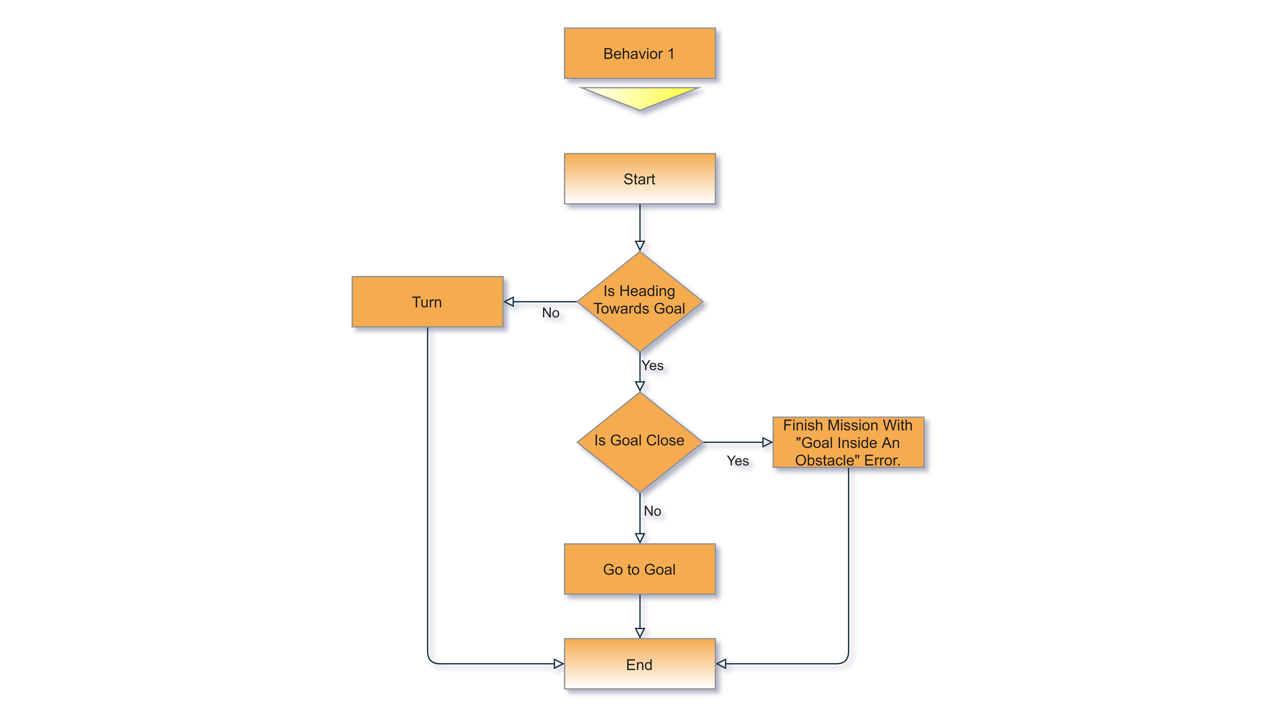
Behavior 1 (Head to Goal)
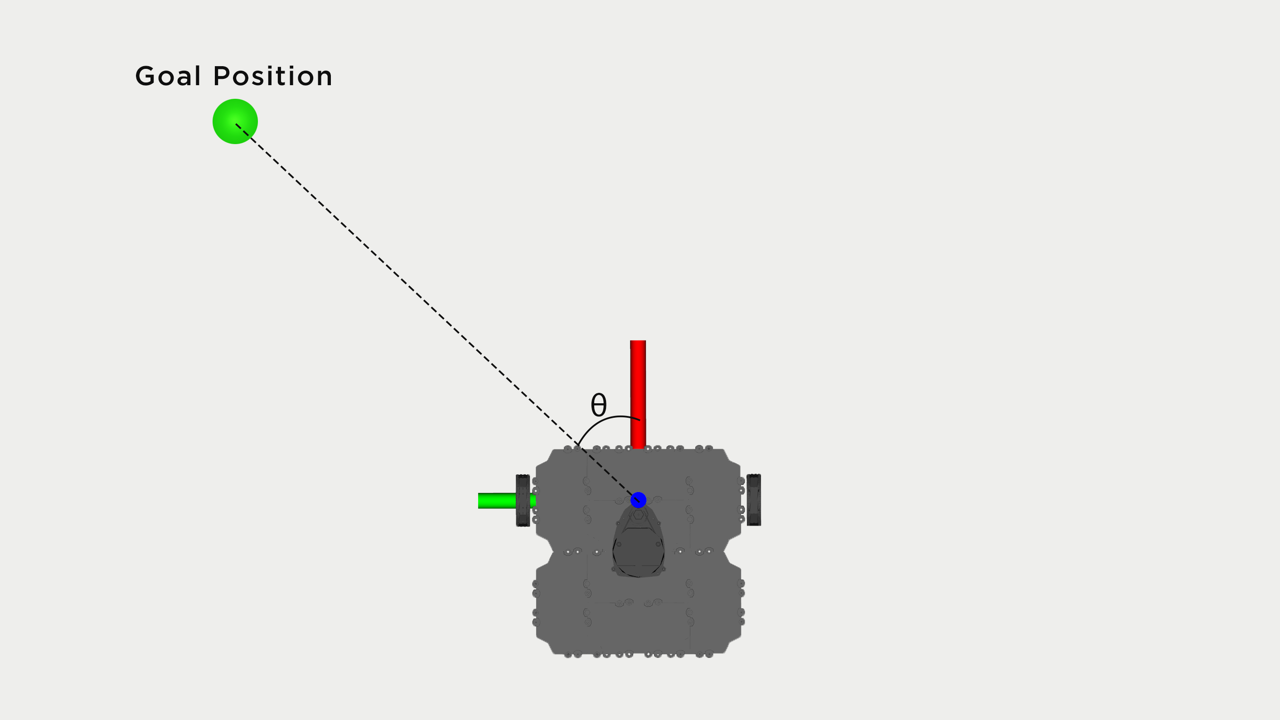
Angular Velocity Calculation:
HeadingAngleToGoal = \arctan { \frac {GoalPositionY { \atop robot }} {GoalPositionX { \atop robot }} }
AngularVelocity = HeadingAngleToGoal * k_0
Linear Velocity Calculation:
DistanceToGoal = \sqrt{\smash[b]{({GoalPositionY_{robot}})^2 + ({GoalPositionX_{robot}})^2 }}
LinearVelocity = f(DistanceToGoal) = \begin{cases} {DistanceToGoal * k_1} &\text{if } | {DistanceToGoal * k_1}|< MaxVelocity \\ MaxVelocity &\text{if } | {DistanceToGoal * k_1}| >=MaxVelocity \\ { } \end{cases}
- The robot is not moving until the heading of the robot is close enough towards the goal position:
LinearVelocity = f(HeadingAngleToGoal) = \begin{cases} {LinearVelocity } &\text{if } | {HeadingAngleToGoal}|< AngleLimit \\ {0} &\text{if } | {HeadingAngleToGoal}| >=AngleLimit \\ { } \end{cases}
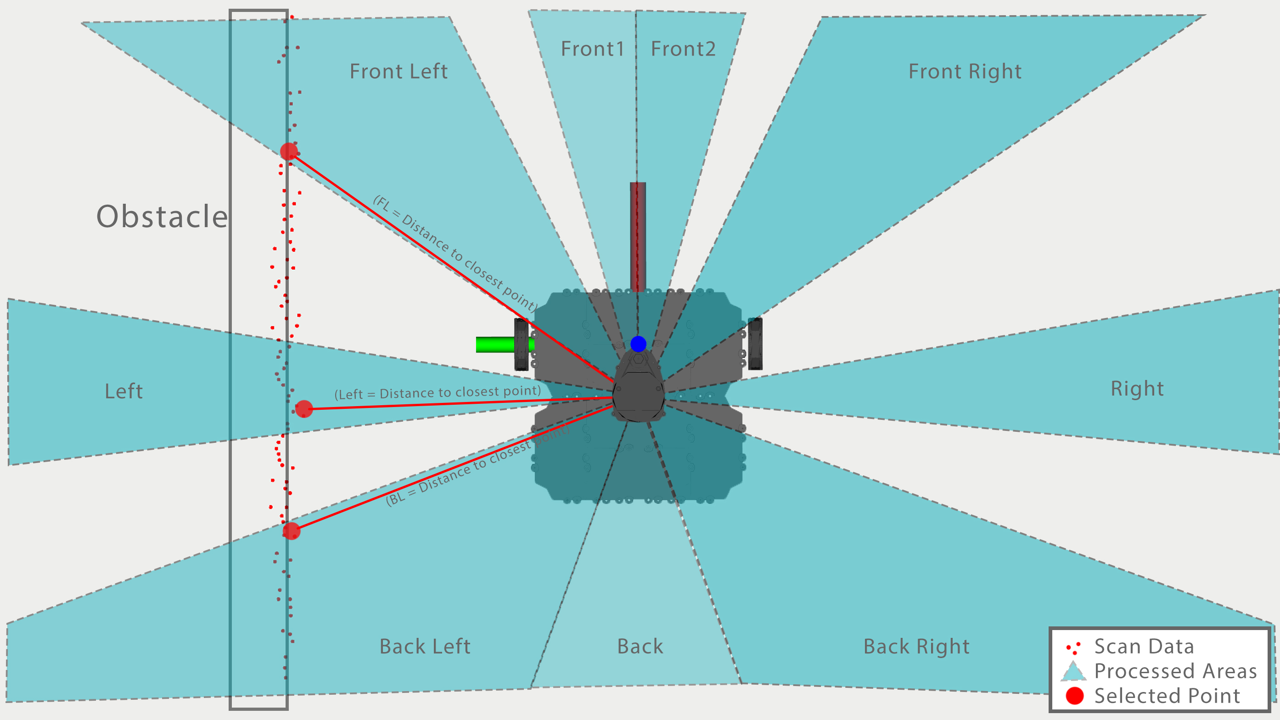
Behavior 2 (Follow Obstacle Boundary)
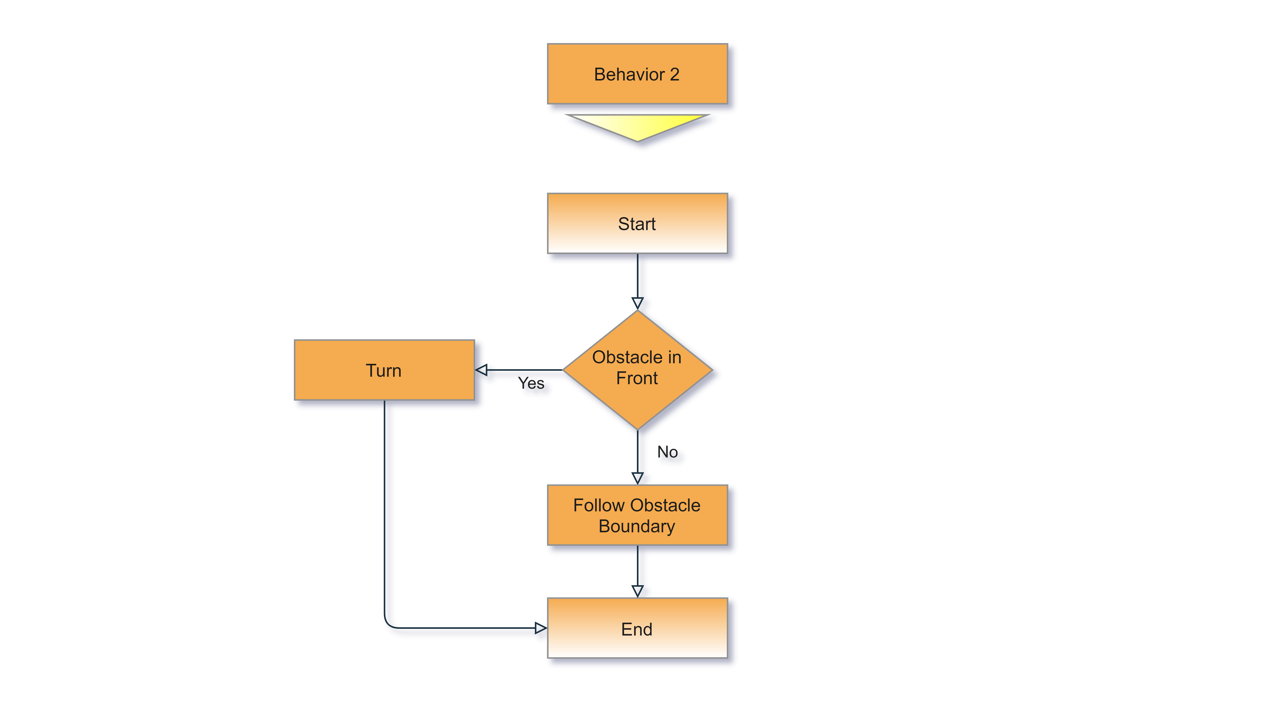
- Following Obstacle Boundary:
Angular Velocity Calculation:
AngularVelocity = (FrontLeft -BackLeft) * k_2
DistanceStabilizer = (FollowDistanceConstant - FrontLeft ) * k_3
AngularVelocity = (AngularVelocity + DistanceStabilizer )
AngularVelocity = \begin{cases} {AngularVelocity } &\text{if } | {AngularVelocity}|< MaxAngularVelocity \\ MaxAngularVelocity &\text{if } | {AngularVelocity}| >=MaxAngularVelocity \\ { } \end{cases}
Linear Velocity Calculation: The robot's linear velocity is proportional to the robot's parallelism to the obstacle.
AngleError = |(FrontLeft - BackLeft)| * k_4
LinearVelocity = \begin{cases} { MaxLinearVelocity - AngleError } &\text{if } {AngleError} < {MinLinearVelocity} \\ MinLinearVelocity &\text{if } {AngleError} >= {MinLinearVelocity} \\ { } \end{cases}
Analysis of Lidar Sensor Data
Related Posts
Check out my all posts-
March 28, 2018
The Dacia Duster organized a roadshow for the launching of the new Duster. The VR application was produced. There was a...
Category DEVICE SOLUTIONS
-
May 1, 2018
This photobooth device is totally mobile, working with the energy of a lipo battery. The device has its own wifi communi...
Category DEVICE SOLUTIONS
-
August 1, 2016
Aquabooth is an underwater photo booth. The user who comes in front of the Aquabooth starts the taking photo process by ...
Category DEVICE SOLUTIONS



Comments
Ryan
4/1/2024
could you please, send me the project source code for this "https://www.theconstruct.ai/exploring-ros-2-wheeled-robot-8-bug-0/ " . I would much appreciate it.
1/10/2021
utku olcar
ActionLib, Bug0, Gazebo, LazerScan, Lidar, linux, Marker, Mobile Robotics, Odometry, Python, ROS, rViz, TF, Ubuntu Embedded System Programming, Robotic Calculations, Robotic Programming
1 Comments