Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I'm actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
Post
Check out my all posts-
A comprehensive guide covering AKS GPU cluster setup, Python API architecture, Docker GPU builds, Kubernetes deployment, async queue with Se...
-
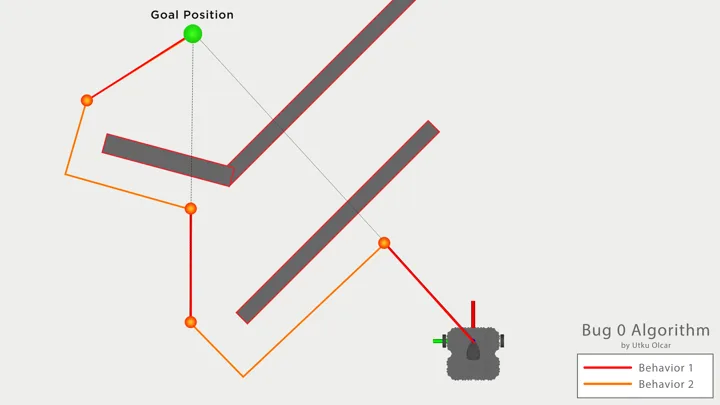
I am going to explain my work that programming the "Bug Algorithm" for the Turtlebot3 robot in the GAZEBO Simulation platform.
-
In this article, I will try to explain this organization with every aspect in detail.
-
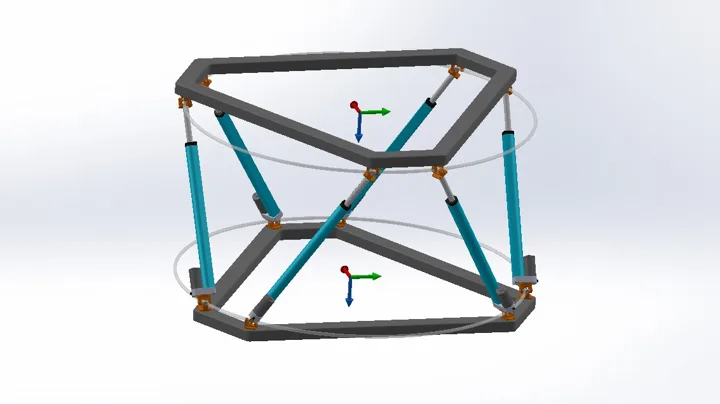
I prepared this post to explain how does inverse kinematics work with parallel robots.