Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I'm actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
All Post
Check out my all posts-
A comprehensive guide covering AKS GPU cluster setup, Python API architecture, Docker GPU builds, Kubernetes deployment, async queue with Se...
-
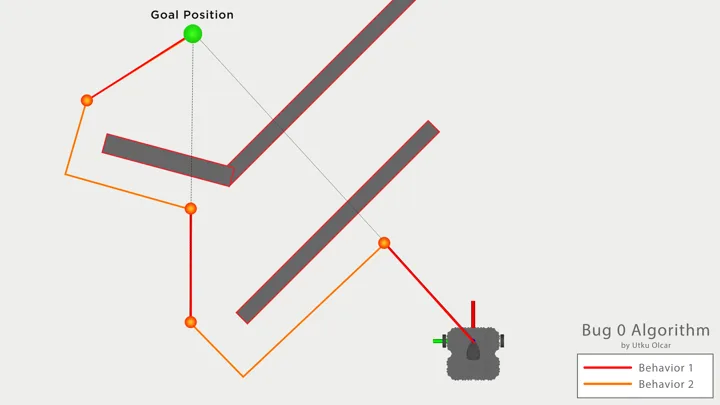
I am going to explain my work that programming the "Bug Algorithm" for the Turtlebot3 robot in the GAZEBO Simulation platform.
-
In this article, I will try to explain this organization with every aspect in detail.
-
We have used special mobile devices to get the participants' brain EEG data of the frontal lobe.
-
The "hologram" concept is basically an optical illusion that is generated using glass' reflection property.
-
Giant robotic hand teleoperation project.
-
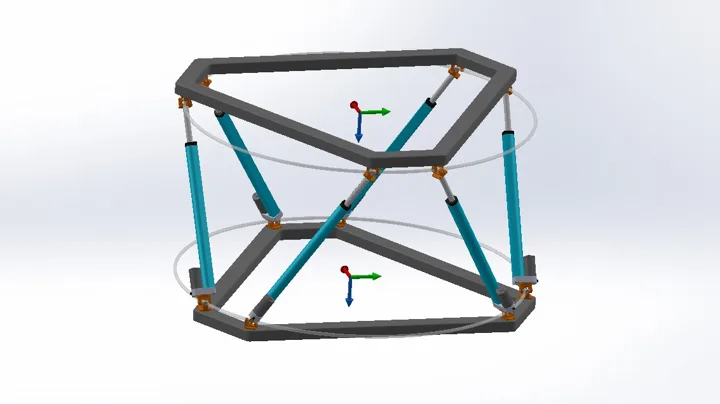
I prepared this post to explain how does inverse kinematics work with parallel robots.
-
Pyramid shaped photo booth.
-
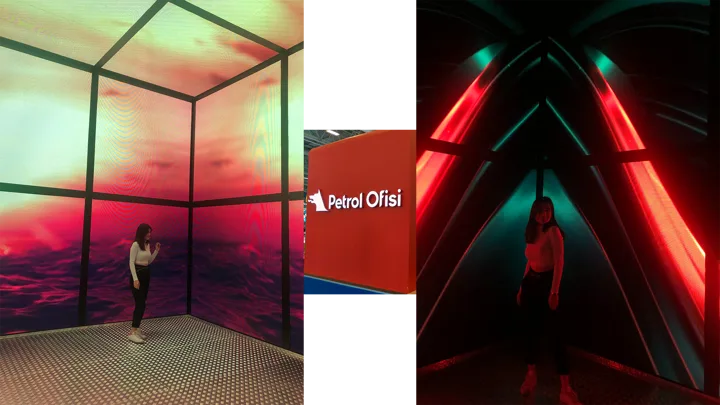
Immersive 360 movie theater experience.
-
Nike Air Max 720 interactive experiment with EEG.
-
Digital penalty kick event game.
-
Twitter challenge event software.
-
Instagram challenge printer event software.
-
Mobile photo booth device for events.
-
Mixed reality experience for Dacia Duster roadshow.
-
Immersive room experience technology.
-
Teleoperation of a humanoid robot using body tracking.
-
Designed and built a full-stack VR snowboard simulation — from 3D modelling in SolidWorks and custom PCB design with a 9-axis gyroscope, to ...
-
Reflex Wall interactive event game.
-
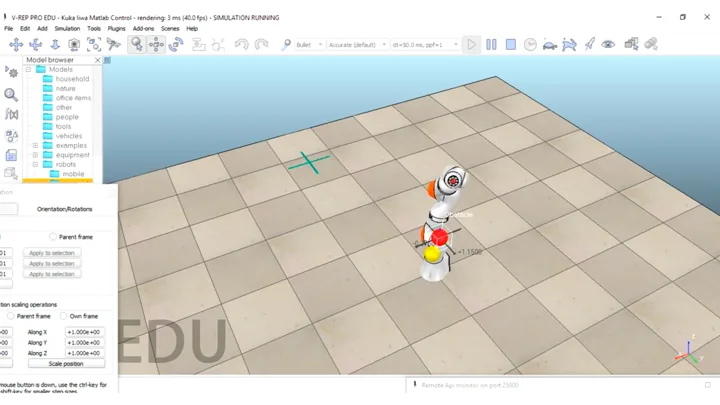
KUKA iiwa robot arm obstacle avoidance project.
-
Underwater photo booth event product.
-
An event game using mobile EEG devices.
-
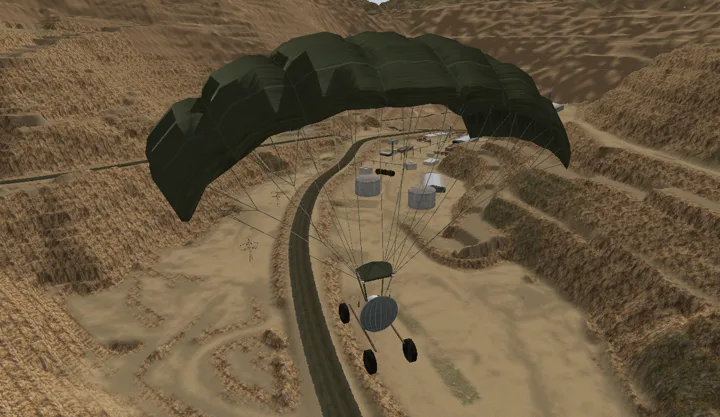
A real-time paramotor flight simulation built in Unity3D, where all aerodynamic forces — lift, drag, thrust, and gravity — are derived from ...
-
IoNeeds is an open IoT smart jars project. Modules on the jar lids measure fullness, temperature, humidity, and light in the jar and send th...
-
An autonomous garbage collector robot project.